







体验产品体验更多产品 >






2.狭义协同模式
人在组织中与人在社会中的最大差异,是组织也有自身的价值追求,而社会则不然。人面对组织,不是简单地面对一群人,组织的最大价值也不一定是所有成员最大价值的算数和。因此有必要将组织从社会中摘出来,单独进行分析。
在中国,尤其需要关注组织中的协同问题。因为近30年来,中国的组织行为模式受到西方政治、经济和产业理论的影响,处于被接轨、被批判、被改造和被优化的局面。我们将中国组织行为中不好的那些方面泼了出去,但在多大程度上将好的方面也泼掉了,还需要反思。协同软件就是一种反思的成果,它是在对中国的组织发展中的文化交汇与交锋的总结和探索中,创造出的一种新的软件思路和产品形态,是适用于中国本土特殊情况的。
狭义协同分为以下三种模式。
(1)齿轮传动协同(N型协同)
齿轮传动协同是狭义协同模式的最基本类型。
齿轮是机械传动的基本模式,它是机器生产的典型象征。图9是齿轮传动模型图。
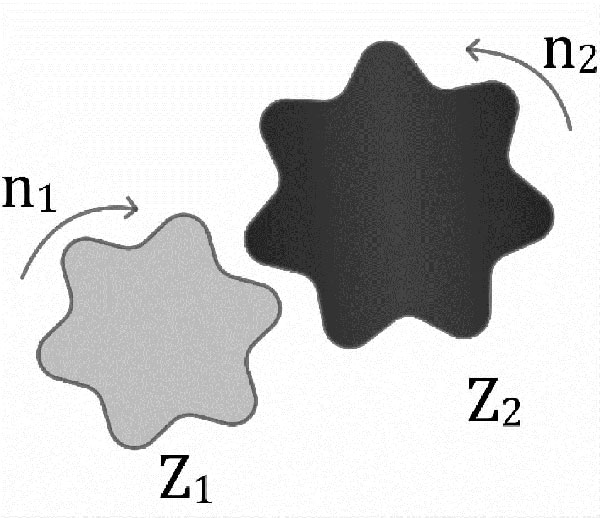
图9齿轮传动模型
图9中,Z1是主动齿轮的齿数,n1是其转速;Z2是被动齿轮的齿数,n2是其转速。用i表示齿轮的传动比,有公式:
i=Z1/Z2=n1/n2
齿轮传动的特点为:
1)标准化。所有的运动都是预先固化到齿轮物理形态之中的,如半径、齿数等,其运动行为被精确定义,且正常情况下不会出现偏差。
2)规范化。齿轮系统的运动规律是固定的,运动周而复始,可预期、可重复,且满足标准化特征。
3)执行力。主动齿轮一旦行动,被动齿轮必然随动,对变化的执行强有力且可靠。
与齿轮传动的特点相一致,泰勒的科学管理思想也具有上述特点:
1)标准化。泰勒从铲料试验中发现工人每锹铲起21磅重的物料时效率最高,于是制造了大小不同类型的铁锹,以适应各种比重不同物料的铲装,使工人每锹都能铲起21磅重的物料。
2)规范化。泰勒记录每道工序、每个动作所需要的时间,加上适当的休息、调整、熟悉操作过程等额外时间,经过周密分析,制定出完成每个标准动作的时间规范。
3)执行力。泰勒实行有差别的计件工资,鼓励工人提高生产效率;并将管理职能和执行职能划分开,建立生产控制、成本计算和质量控制的基本制度,确保工作的执行效率。
泰勒的管理思想延续至今,依然是组织管理的重要内容。齿轮传动协同模式就是这一思想在组织协同管理中的直接体现,它吸纳的管理思想包括:(1)精确管理思想;(2)信息对称(全信息)管理思想;(3)执行力思想。从第一章中我们还知道,这种思想在信息思维模式中被称之为“确定性思维”。
在齿轮传动协同中,有两个“齿轮”互相咬合,第一个齿轮是“信息”,它包括组织可能会用到的所有类型的信息;第二个齿轮是“机构”,它主要是组织中的所有正式机构,而正式机构与固化的业务是相对应的。其基本原理是:在组织中,任何一类信息都会被传递给所有的机构,任何一个机构(业务)都能获得所有的信息。通过信息与机构(业务)的传动,协同管理得以实现。
齿轮传动协同模式如图10所示。由于齿轮咬合的形状与字母N的形状类似
(用一点儿形象思维),所以将此类协同简称为“N型协同”。
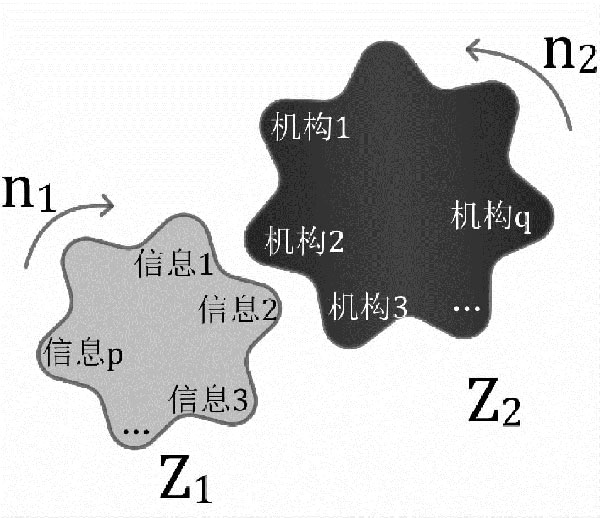
图10齿轮传动协同模式
图10中,Z1是信息类型的数量,n1是信息传递速度;Z2是机构数量,n2是机构响应速度。用r12表示齿轮传动协同的协同系数,公式为:
r12=n1/n2
用112表示齿轮传动协同的协同维度,公式为:
112=Z1xZ2
关于参数r12,可以举例说明:
组织中发通知,以书面的方式发放,需要2个小时才能依次发到所有的10个部门中。而每个部门都需要花5分钟时间才能读完通知。这里n1=120分钟,n2=5x10=50分钟,则r12=120/50=2.4。若换一种方式,在协同系统上发通知,需要5分钟发布完毕,所有10个部门用30分钟就可以看到并读完通知。则这里n1=5分钟,n2=30分钟,r12=5/30=0.17。可见r12值的大小反映了组织中协同效率的高低,也就是组织价值实现的程度。
关于参数112,可以举例说明:
组织中有6类基本信息,即Z1=6;组织中有10个部门,即Z2=10,则组织中可能存在的协同维度112=Z1xZ2=60。这就是一个常见的Exce1交叉表(cross-tab1e)。确保信息在所有的维度中畅通流转,是齿轮传动协同模式中组织价值最大化的体现。
由上可见,齿轮传动协同模式的核心是组织中那些相对固化的要素,如信息和机构(业务)。其难点也在于将这些要素固化下来,如将组织所需要的信息都录入系统,分门别类管理好;对于机构,就要明确机构的职能、权责、岗位及人员等。因此基于这种模式的协同软件的核心功能,一个是知识管理,另一个是机构(业务)管理。
齿轮传动协同模式的优点是为组织提供了全面的信息支撑,使得组织行为建立在信息对称的基础上,实现组织行为的标准化和规范化,大大提高组织行动的执行力。其缺点是忽视了组织中那些不能被有效固化、处于变动之中的因素,如流程的复杂性、人员的参与程度、业务的例外情况、策略的难言性,等等。所以这类协同管理不适用于创新型组织、成长型组织,而较适合于成熟组织、固定业务流程型组织(如政府部门)等。此外,如果过度追求信息的完备性,则不仅可能会带来协同成本的大幅攀升,而且也会增加决策的信息压力。
(2)闭环控制协同(0型协同)
从齿轮传动协同模式中,我们认识到为了处理那些变动因素对协同的影响,需要引进新的管理思想。闭环控制思想源于自动控制领域,但后来也逐渐推广到社会管理之中,成为“信息思维”的核心思想之一,它可以处理管理中的变动性。正如维纳所言:“世界在控制机理上是统一的”,“一切有目的的行为都可以看作需要负反馈的行为”。从第一章中我们得知,在信息化思维中这被称之为“控制性思维”。图11是闭环控制的基本模型。
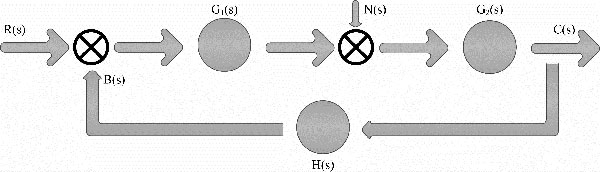
图11闭环控制模型
图中,R(s)叫做控制信号,C(s)叫做被控信号,G1(s)、G2(s)叫做控制器的传递函数,H(s)叫做反馈测量装置的传递函数,N(s)叫做干扰信号,B(s)叫做反馈信号。用小(s)表示系统的闭环传递函数,则有:
小(s)=C(s)/R(s)=G1(s)xG2(s)/[1+G1(s)xG2(s)xH(s)](无干扰时)小(s)=C(s)/N(s)=G2(s)/[1+G1(s)G2(s)H(s)](纯干扰时)
闭环控制的基本思想是对输出量与输入量进行比较,利用输出量与输入量的偏差来进行控制,力求保持两者之间的既定关系。其特点是:
1)动态化。它允许在系统运行中出现不稳定情况,也允许外来干扰对系统造成影响,但它会实时将系统处理的结果反馈到输入端,并进行相应的调整,确保整个系统处于动态平衡状态。
2)可控化。闭环控制系统的每一个运转周期的状态可能都不相同,存在着误差,但系统总体误差是处于可控状态。也就是说,系统的运转不是一种规范化状态,而是围绕着规范状态在运行,八九不离十。
3)健壮性。闭环控制系统在执行力方面,允许与既定目标有所偏差,但系统以反馈机制来对其进行消化和调整,以确保整个系统目标的达成,从而使系统保持健壮性。应该说,齿轮传动模式那种精确的、不走样的执行力是理想状况,而闭环控制模式中这种允许误差的执行力更接近现实情景。
与闭环控制思想相一致,行为科学理论和现代管理理论、现代经济学及社会学等相关理论,都着眼于解释和解决组织中的各种变动因素,如非正式群体、非正式组织、士气、需求层次、个人效率、有限理性、博弈、激励等等。因此,基于闭环控制思想的协同软件所要着重解决的组织中的问题是:
1)人的充分参与。以人为核心,着眼于组织中人的行为,包括人与人、人与组织的互动关系,保证人能在软件中实现主要的行为需求;
2)可变动和抗干扰。将软件系统立足点置于“人”这个要素上,就决定了它必须具有良好的可变动性和抗干扰性。例如它必须支持工作流程的灵活变更(加签、改签、回退等),要支持任何一个员工从任何一个环节上进入到流程之中;
3)可反馈调节。软件系统不仅要支持变动和干扰,还要能对其进行消化处理。这就是要具有反馈调节功能,实现一个协同行为可以在员工之间反复进行(震荡往复),直至符合每个人的价值需求;
4)确保组织价值实现。软件消化和调节各种变动和干扰,基本目标是确保组织的价值实现。
图12是闭环控制协同模式的模型图。由于闭环控制模型的形状与字母0相似,所以将此类协同简称为“0型协同”。
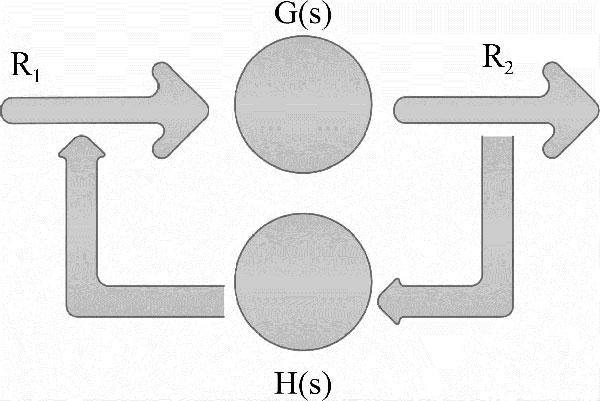
图12闭环控制协同模式
图12中,R1叫做协同发起,R2叫做协同结果,G(s)叫做协同控制,H(s)叫做协同反馈。用r12表示闭环控制协同的协同系数,则有:
r12=R2/R1=G(s)/[1+G(s)xH(s)]
从公式可见,闭环控制协同模式与上述各种协同模式不同,它不可被分为两个相对独立的方面,而是构成一体,循环调节,呈现出非线性的协同结果。从结果与设定值之间的偏离程度可以评价系统的运转质量。这种结果可以用图13来加以说明。从图中可见,协同结果呈现循环调节、逐渐逼近目标的状态。
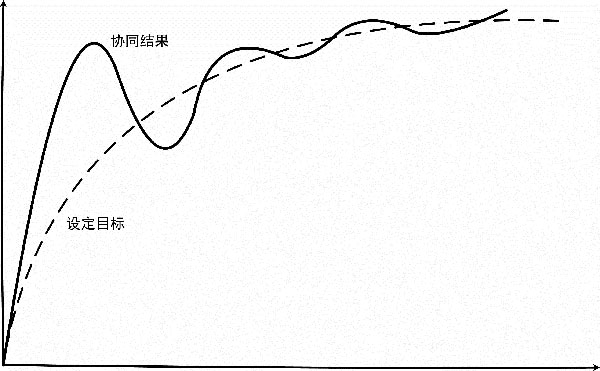
图13闭环控制协同结果示意图
(3)弹性网络协同(S型协同)
闭环控制协同解决了组织价值实现的问题,但没有圆满实现组织价值最大化的目标。为什么呢?首先,控制模式是结果导向,用上一个结果来调整下一个行动,因此系统运行具有滞后效应;其次,控制模式只能实现对既定目标的逼近,而不能对目标本身进行优化。如果目标设定有误,则控制过程也就毫无意义;第三,最重要的是,控制模式回避了对系统中消极因素的直接处理,反而默认其破坏作用的发生,等这种作用产生后果之后,再想办法调整初始行为———而不是设法除去消极因素,这就产生了系统内部的损耗。
由此可见,我们需要构建一种更加积极的协同模式,它能对组织中任一因素的作用产生反应无论这种作用是大还是小,是强还是弱;它能积极改善每一个因素在组织中的表现,使之与组织的互动尽量紧密、价值观尽量趋同;它能通过激励来提高每一个因素对组织价值的认同,从而实现组织价值与个人价值的共同最大化;它能使组织与其所在的社会环境有机连通,让组织之外的所有相关社会因素也能够参与进来,从而通过改善组织的社会建构来使之价值得以提升。从第一章中我们得知,在信息思维模式中这被称之为“智能化思维”。因此,我们需要构建一种具有内在动力、内在智慧的协同模式,来实现组织价值的最大化。
信息社会理论为我们提供了思维原型。如前所述,曼纽尔·卡斯特将信息社会定义为“网络社会”,将“网络”这一技术模型推广为社会模型,并强调说社会网络能够且必须保持“弹性”。“弹性网络”这一概念,同样源于信息技术的最新发展,它表现为社交网络(SNS)的兴起。同时,在网络社会思潮的影响下,“网络组织”也成为组织研究的前沿。基于上述技术和社会的双重理论背景,我们提出“弹性网络组织”这种未来的组织形态,并将“弹性网络协同”作为未来的协同模式。
根据相关文献,弹性网络的模型如图14所示。由于弹簧的形状与字母S相似,所以将此类协同简称为“S型协同”。

图14弹性网络模型
图中,节点i和j之间的作用叫做rij。当节点i和j从平衡位置开始运动时,会相对于平衡位置(原点)发生位置变化,记为D.Ri、D.Rj(它们是相对于原点的向量)。这会引发rij的变化,其公式为:
D.rij=D.Rj-D.Ri
D.rij本质上与i和j之间的弹性系数('Y)、整个网络的矩阵结构(N)相关,反应了'网络的潜在能量'(potentia1energyofthenetwork),记为VGNM,其公式为:
VGNM=y21ii,
这个公式表明在弹性网络中存在着一种可以被计算的能量,其特点是:
1)它与网络结构相关。网络中的节点数量、网络结构的复杂程度等,会对网络的潜在能量形成影响;
2)它与节点间的弹性系数相关。节点间的作用力的大小,会对网络的潜在能量形成影响。
3)它与节点的运动状况相关。节点运动会带来节点间能量的改变,从而改变网络能量。
借用这种思想,我们考虑构建一种新的协同模型,它能实现以下组织目标:
1)建立组织中人与人、人与组织之间的有机联系,形成一个将所有因素都连接起来的网络;
2)建立组织中各节点间的作用力,并为每个人提供建立作用力的方法和手段;
3)观测、记录、计算和评价组织中协同作用力的数量和质量;
4)提高每个节点间的作用力,从而提高整个组织的潜在价值;
5)当某个节点产生行动的时候,所有与之相关的节点都能响应,并基于最大的作用力进行协同,从而达到组织价值和个人价值的共同最大化。
这就是弹性网络协同模式的基本内容。图15是其基本模型。
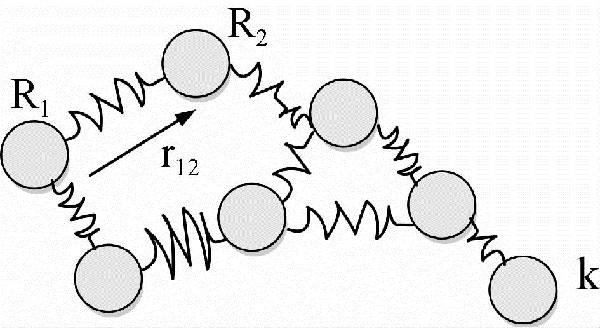
图15弹性网络协同模式
图中,R1、R2表示组织内任意两个节点,r12表示这两个节点间的协同系数,
K表示组织外部的相关节点。'Y表示节点间的弹性系数,N表示网络节点总数(包括K)。则有:
r12=f(D.R1,D.R2,'Y,N)这个公式表明了弹性网络协同系数的影响因素,至于f是怎样一个函数表达式,还需要深入研究。
基于弹性网络协同模式所构建的协同软件,应该具有以下一些核心功能:
1)协同数据挖掘。对协同行为的记录、测量和激励。协同行为应具有可测量性,具有一系列量化指标,在系统运行时自动记录和测量,这就相当于记录节点与平衡位置的位移量。根据数据挖掘结果设计出合适的激励机制,让个人愿意持续改善其协同行为。
2)软件动力设计。协同软件必须具有一种引导、促进、激励组织成员参与协同的内在动力,这类似于组织节点之间保持一种弹性系数。使个人在使用软件的时候,感受到被需要、被认同和被赞赏,从而愿意响应组织的协同要求,提高协同绩效。
3)线上线下联动。网络组织不是互联网上的组织,而是组织的网络化,包括线上和线下两个方面。协同软件应该促使组织成员以在线方式来支持线下协同活动,形成一种人际间的情感、文化和心灵的认同,从而提高协同绩效。
4)组织内外连通。协同软件要提供一种既便捷又安全的机制,让组织外的相关人员都能参与到组织的协同行为之中,他们在可以接触到的范围之内,使用与组织内部人员相同的软件功能。
5)组织价值提升。协同软件应该让组织的成员达成共同行动,来提高自己对组织的贡献,从而提升组织的整体价值。协同软件要将这种价值提升展现出来,让组织成员都能看到。
6)回归个人价值。如果可能,协同软件应支持人们超越组织界限,回归到人与人之间的简单交往,将任何价值需求,都通过最简单的协同行为实现。此时组织的价值观与个人的价值观是高度一致的,组织价值实现是个人价值实现的不言而喻的结果。
这样的协同场景将会是怎样的呢图16展示了它那激动人心的壮观图景。在第5章中我们将具体剖析各种基于网络结构的协同活动。
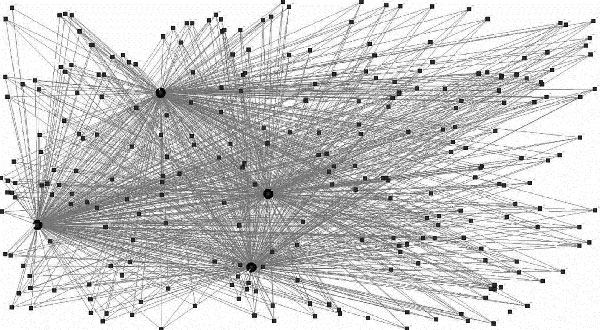
图16弹性网络协同示意图
注:本文摘自由致远协同研究院出版的《协同管理导论》,转载请注明出处,即“致远软件官网”。申请试用致远软件相关产品,请拨打免费电话:4007003322。
AI赋能 · 开箱即用 · 无缝协作
百余种业务应用互联互通,无缝衔接
















行业领航 · 深度定制 · 标杆实践
行业专属定制方案,源自TOP企业成功实践











 京公网安备11010802020540号
京公网安备11010802020540号